COMPENSAZIONE DINAMICA DI UN SENSORE DI TEMPERAURA Pt100
Studenti: Matteo Bonato, Matteo Bonetto, Enrico Michelato
Supervisore: Prof. Mariolino De Cecco
L’obiettivo della tesi è innanzitutto creare un termometro utilizzando la Pt100 come sensore di temperatura. Tramite questo termometro, poi, vogliamo creare uno strumento che sia in grado di approssimare la temperatura del corpo in esame in pochi secondi, senza dover aspettare l’equilibrio termico.
1.1 Individuazione della funzione di trasferimento
Sia la sonda dotata di massa M, coefficiente termico c, coefficiente di scambio termico convettivo h e superficie di contatto A. Data Tf la temperatura del fluido in cui è immersa, posso eguagliare la potenza termica trasmessa tra essa ed il fluido in questione con la derivata dell’energia termica scambiata dalla stessa:

Applico ora la trasformata di Fourier per ricavare la corrispondente equazione algebrica nel dominio di Fourier. Ricavo la funzione di trasferimento data dal rapporto tra la temperatura attuale della sonda e la temperatura del fluido nel quale essa è sommersa:

2. Circuito

2.1 Descrizione del circuito
Il circuito che andrà a comporre l’intero PCB, il cui schematico è qui riportato, può essere diviso in quattro sezioni:
- slot per il collegamento delle pile, ossia l’alimentazione del PCB
- il circuito principale del PCB, che permette di convertire la temperatura della Pt100 in un valore di tensione
- un microprocessore, Arduino NANO, che elabora il segnale di tensione sopra citato
- un display 7 segmenti, per leggere la temperatura della sonda Pt100
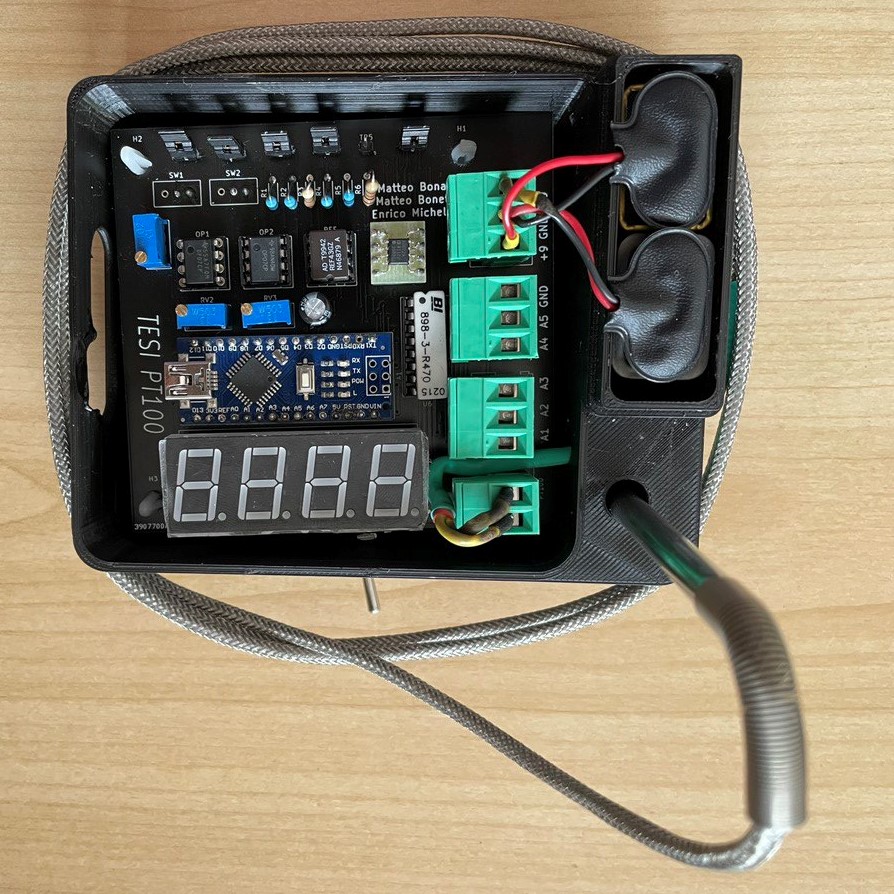
Il circuito è stato prima assemblato su breadboard e in seguito saldato su millefori, e poi su PCB, come illustrato nelle immagini sottostanti.

3. Identificazione della costante di tempo
3.1 Importazione dati
Per determinare la costante di tempo τ della sonda Pt100, la abbiamo sottoposta ad un gradino di temperatura immergendola in un fornelletto a temperatura costante. Sono stati quindi registrati i valori di tensione in uscita dal circuito, determinando quindi la temperatura della Pt100.
3.2 Primo Metodo

L’equazione che descrive l’andamento della temperatura nel tempo (ricavata dall’equazione 2) è:

il valore di temperatura al tempo t = τ vale quindi

Si noti dunque che di questa formula appena descritta conosciamo tutte le variabili.
L’idea è quindi quella di trovare il valore di temperatura sperimentale più vicino possibile al valore teorico individuato, e da quello trovare il valore di tempo al quale la Pt100 raggiunge quella temperatura, che corrisponderà al valore di tau.
3.3 Secondo Metodo
Data la seguente equazione:

rappresentiamo su un grafico ![]() sull’asse X, e il tempo sull’asse Y, otteniamo l’equazione di una retta che ha per coefficiente angolare -1/τ.
sull’asse X, e il tempo sull’asse Y, otteniamo l’equazione di una retta che ha per coefficiente angolare -1/τ.
Attraverso una regressione lineare (interpolazione) viene approssimato l’andamento della curva determinata con una retta.
Ricordando che il valore del coefficiente angolare di questa retta è -1/τ, possiamo risalire ad un valore di τ.

3.4 Terzo Metodo
Vengono, in pratica, “simulate” tante prove, ognuna corrispondente ad una Pt100 con un valore di τ diverso. Quella che più assomiglia alla prova da noi svolta sarà quella corrispondente al τ che più si avvicina a quello della nostra sonda Pt100.
 Il valore approssimato di τ è ottenuto dalla media di tutti i valori determinati:
Il valore approssimato di τ è ottenuto dalla media di tutti i valori determinati:
τmedio = 96.0.967s
4. PCB

4.1 Descrizione Generale
Nella realizzazione del PCB (Printed Circuit Board) è stata determinata la disposizione dei dispositivi in modo da consentire un facile utilizzo dello strumento.
Un esempio sono la posizione centrale del display, la disposizione laterale di Arduino, che permette la programmazione senza doverlo necessariamente rimuovere dalla scheda, e la posizione dei test point, collocati verso l’esterno della scheda. Inoltre è importante che l’alimentazione sia rivolta verso l’esterno. Questo per facilitarne il collegamento con le pile che saranno posizionate nella custodia, esternamente al PCB.
Tale custodia verrà infine fissata al PCB tramite i fori di montaggio posizionati ai quattro angoli della scheda.
5. Compensazione dinamica
5.1 Introduzione
Dato un sistema dinamico regolato da equazioni differenziali lineari, la caratteristica che determina l’uscita in base ad un ingresso è la funzione di trasferimento.
In un sistema di misura, l’ingresso u(t) viene inteso essere il misurando, mentre l’uscita corrisponde con il segnale che lo strumento fornisce.
Chiaramente è necessario avere una certa conoscenza dello strumento utilizzato per effettuare la misura, ed in particolare della sua funzione di trasferimento. Quindi, nel dominio delle frequenze, vale la seguente relazione:

dove U(ω) è l’uscita, H(ω) la funzione di trasferimento, e Y (ω) l’ingresso.
Nel nostro caso specifico, Y (ω) è la temperatura che noi vogliamo sapere, cioè la temperatura del fornelletto. H(ω) è la funzione di trasferimento dello strumento che utilizziamo per misurare il fornelletto, ossia la Pt100. U(ω) è la misura dell’uscita del circuito, che noi quindi conosciamo.
La compensazione dinamica è proprio il processo che permette, avendo a disposizione l’uscita dello strumento, di stimare l’andamento del misurando e quindi effettuare l’operazione di misura.

6. Metodi 1
6.1 Introduzione
L’idea su cui si basa questa soluzione prevede di dividere il segnale in intervalli (tint), abbastanza ampi da contenere più campioni (tc), e salvare il valore di tensione in ingresso rilevato al primo campionamento.
A questo punto, ipotizziamo che da un intervallo all’altro non vi siano sbalzi della temperatura d’ingresso significativi (essendo comunque Tint circa un secondo non ci aspettiamo, nel campo delle misure termiche, variazioni a queste frequenze) e così facendo possiamo considerare ogni intervallo soggetto ad ingressi a sé stanti.
Possiamo quindi, con le equazioni precedentemente calcolate, determinare la temperatura del fornelletto relativa ad ogni intervallo di temperature.
6.2 Risultati
La compensazione dinamica effettuata con questo metodo è riuscita, e nella foto qui sotto vi è un esempio

Sull’asse delle ascisse è presente il tempo [s], mentre sull’asse delle ordinate si trova la temperatura [C°].
Circa dopo 60 secondi la sonda Pt100 è stata messa nel fornelletto, sottoponendola dunque ad un gradino di temperatura.
La curva rossa rappresenta la temperatura della Pt100, che sale lentamente fino ad arrivare al valore di assestamento, ossia la temperatura del fornelletto (circa 50 gradi).
In azzurro è rappresentata la temperatura compensata, risultato del codice descritto sopra. Come si può notare, la temperatura compensata già dopo 20 secondi riesce a predirre abbastanza accuratamente la temperatura del fornelletto, mentre la sonda Pt100 ci impiega almeno altri 3 minuti.
7. Metodo 2
7.1 Descrizione
Come ricavato nel Capitolo 1, la funzione di trasferimento che lega l’ingresso e l’uscita del nostro sistema è la seguente:

Isolando quindi la variabile di interesse, ossia la temperatura finale Tf(ω) otteniamo:

Nel dominio di Laplace, moltiplicare la variabile T(ω) per (i omega), corrisponde, nel dominio del tempo, a fare la derivata di T(ω).
Trasformando nuovamente l’equazione precedente e tornando quindi nel dominio del tempo, otteniamo:

Tra i vari modi di effettuare una derivata, noi abbiamo scelto il più semplice, che poi si è rivelato anche essere il più efficace. La derivata di T(t) viene svolta semplicemente campionando 2 valori di T(t) e dividendo la loro differenza per il tempo di campionamento tc.
7.2 Risultati
La compensazione dinamica effettuata con questo metodo ha funzionato, e qui sotto ne sono mostrati i risultati:

Sull’asse delle ascisse è presente il tempo [s], mentre sull’asse delle ordinate si trova la temperatura [C°].
Circa dopo 20 secondi la sonda Pt100 è stata messa nel fornelletto, sottoponendola dunque ad un gradino di temperatura.
La curva rossa rappresenta la temperatura della Pt100, che sale lentamente fino ad arrivare al valore di assestamento (circa 100 gradi).
In azzurro è rappresentata la temperatura compensata, risultato del codice descritto sopra. Come si può notare, la temperatura compensata già dopo 20 secondi riesce a predire abbastanza accuratamente la temperatura del fornelletto, mentre la sonda Pt100 ci impiega almeno altri 3 minuti.
8. Conclusioni
Come si può notare dai grafici dei risultati prima mostrati, le curve delle temperature compensate (linee azzurre), appaiono, anche se poco, “sporcate” da un rumore in alta frequenza.
Il rumore in alta frequenza è rimasto, seppur in misura molto minore, anche dopo aver messo un filtro passa-basso dopo l’uscita del circuito.
Il filtro in questione è un filtro R-C del primo ordine, con frequenza di taglio a 10 Hz.
Senza il suddetto filtro, la temperatura della Pt100 veniva registrata con un rumore piuttosto elevato, e ciò causava delle oscillazioni piuttosto brusche della curva della compensata. Questo fenomeno si può notare bene da questo grafico:
Il rumore, come si può notare dai grafici dei risultati, non è scomparso completamente.
Questo a causa dell’amplificazione delle alte frequenze che avviene durante l’inversione della dinamica.