Lidar Scan matching 4 Simultaneous Localization And Mapping – Class and Homework
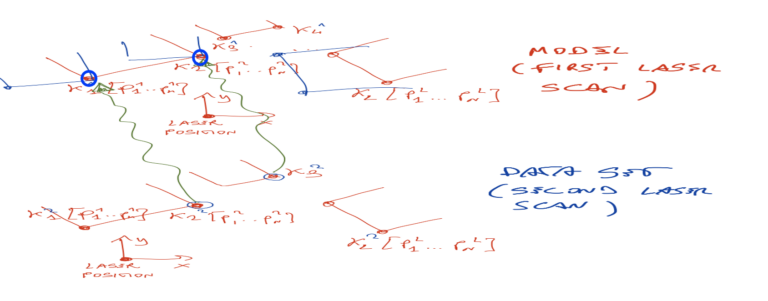
Rules: if you reached the goal to estimate two scan matching and relative pose estimation with Ransac and SVD and are able to discuss at the oral of the exam +1 point @ the final grade if you reach the…