In this work, we address the problem of estimating the 6DoF pose of objects in 2D equirectangular images. This challenge allows the transition to the objects’ 3D model from their current pose. In particular, it finds application in the educational setting to enhance student learning with limited resources by providing a more engaging and immersive experience with objects due to the possible interaction with their 3D virtual models. We developed a general approach usable for any object and shape.
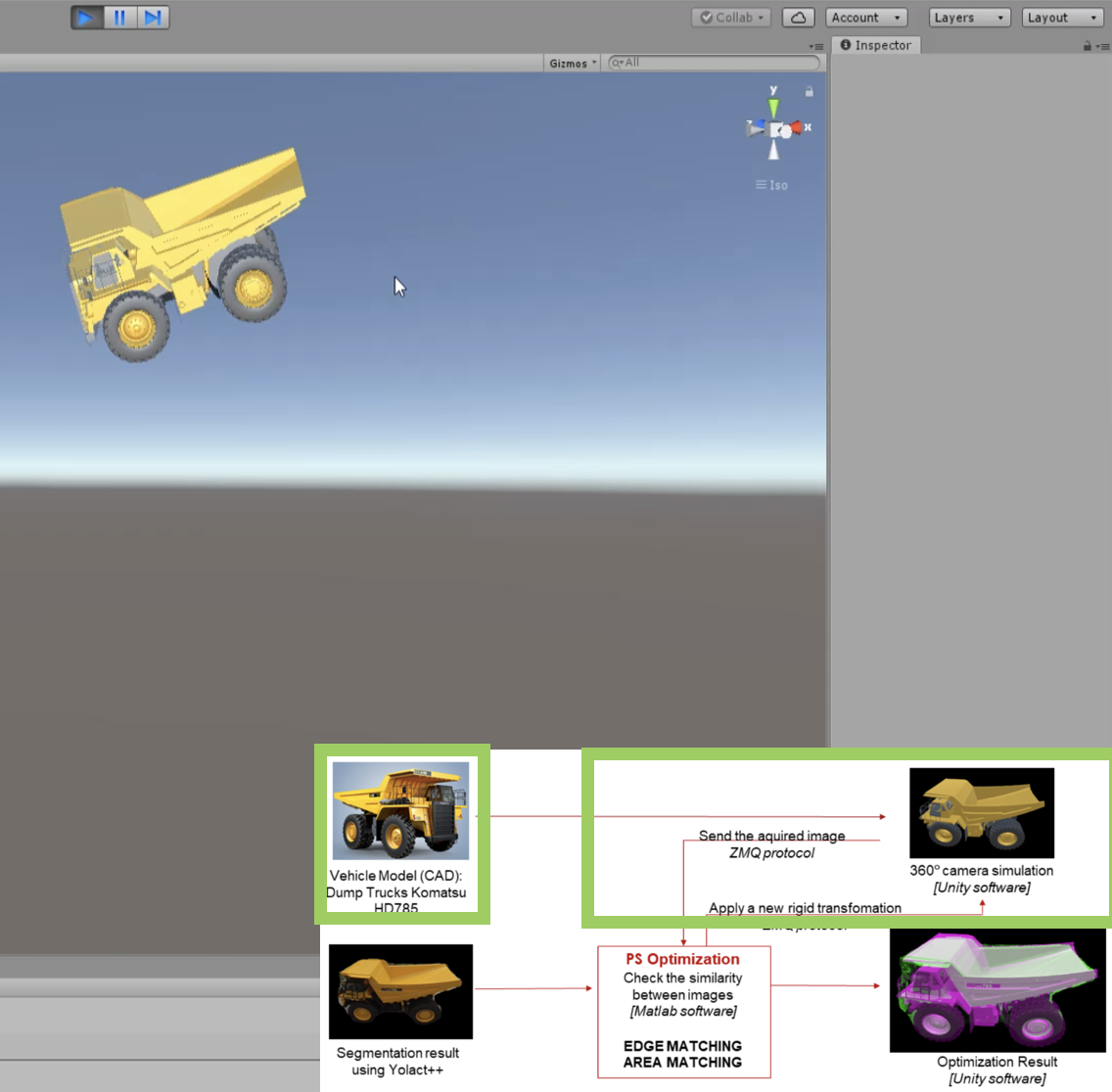
The only requirement is to have an accurate CAD model even without textures of the item whose pose must be estimated.
The developed pipeline has two main steps: vehicle segmentation from the image background and estimation of the vehicle pose.
CITE: Zanetti, M., Luchetti, A., Maheshwari, S., Kalkofen, D., Ortega, M. L., & De Cecco, M. (2022). Object Pose Detection to Enable 3D Interaction from 2D Equirectangular Images in Mixed Reality Educational Settings. Applied Sciences, 12(11), 5309.