Master Thesis by: Zuccato Pierpaolo
Thesis Title:
PATH PLANNING AND TRACKING FOR NON-HOLONOMIC VEHICLES IN NON-STRUCTURED ENVIRONMENT.
My thesis work has contributed to develop an Automated Guided Vehicle able to operate inside unstructured warehouses, such as those generally available inside small and medium enterprises. The goal is to create an autonomous mobile robot can localize a roughly positioned pallet in a storage area, plan the path for pallet picking and navigate, even for long distances, with no references at known locations in the environment. The system will automate the entire production line, up to the storage and shipping. This project is developed by the Robotics Group of Trento University, in collaboration with the Digipack S.r.l. Company, which deals with the design and construction of automated systems for packaging, palletizing and shipping of finished products. The methodologies and algorithms developed in the project, especially for target localization and path planning, are tested at the company R & D division, using an AGV prototype. The vehicle used is equipped with a laser-guided system that allows its localization in a structured environment, but is not able to locate the target and the picking is performed by knowing the exact position of the pallet. Moreover, the planning of the movements is carried out with very simple paths, consisting of straight lines and circular arcs, which do not offer the necessary degrees of freedom to perform the pallet picking. In order to find the pose of the pallet, the Department of Robotics implements a laser system-camera (Pallet-Finder) using algorithms that combine the information from either sensor. This system is able to provide the pallet pose (X, Y, Attitude) respect to the vehicle.

Figure 1: Fields of activity of the Digipack S.r.l.
 |
 |
Figure 2: The LGV E12 prototype.
 |
 |
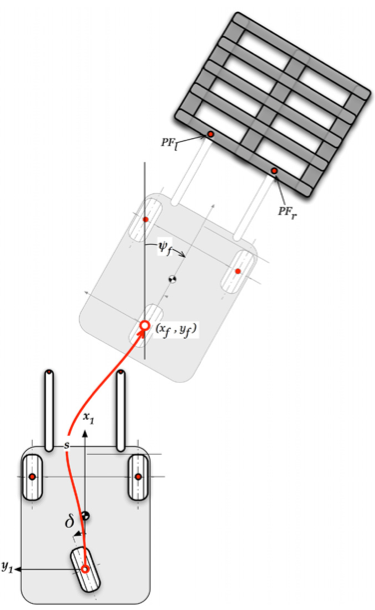
Figure 3: Path Planning with Cubic Clothoids.
My thesis work has focused in particular on the path planning and tracking for the pallet picking. This task impose different specific to the path, which in addition to meeting the non-holonomic constraints of the vehicle (in particular the continuity of the curvature), must allow the AGV to reach any point of the workspace with a generic attitude. Also required is a planning carried out with a single maneuver, and efficient algorithms that allow a Real-Time execution.
It therefore proved necessary to implement a planning method that allows it to impose the start and end pose (position + attitude) of generated path, as well as boundary curvature conditions, since the AGV has to perform the picking operation with the forks perfectly aligned to the pallet. We opted for Steering function, in particular we use Cubic Clothoids. This class of curves allow to satisfy all these specifications and are highly compatible with the kinematic model of the vehicle, since they are defined by expressing the curvature as a function of the abscissa using a third-degree polynomial.
To speed up the porting of code and align with programming standards of the Digipack Company, I implemented a simulator, built in ANSI C as the other algorithms, with a graphics library.
 |
 |
Figure 4: The figure shows two simulations carried out with the ANSI-C simulator.
 |
 |
Figure 5: a) Flow chart diagram of Static Linearized Feedback. b) PC-Sliding base idea.
The simulator allows to create various situations that may arise in path planning, considering the size of the vehicle and the environment, and supports the management of the various reference systems. It also contains the kinematic model and the real parameters of the vehicle, thus allowing the determination of inputs and open-loop configuration variables of AGV, and lets to implement strategies for path tracking and motion control.
I have also implemented two algorithms for path tracking, to correct any interference from the nominal conditions. The first algorithm expects to add two contributions to the open-loop input, exclusive depending on the magnitude of the distance error away from the planned path. The second strategy for path tracking use an algorithm that acts as both a planner that controller. In this case there is no distinction between contributions open-loop and closed-loop and the steering control input is provided as a single contribution.
During the tests performed at the Digipack Company, we collected experimental data, measuring positioning errors during the pallet picking operation. The data were validated especially considering lateral displacement and attitude error. The graph shows that the performed tests meet the minimum of accuracy for the pallet picking.
 |
 |
Figure 6: The experimental points obtained with each test picking considering the lateral displacement
obtained (x axis) and the error of attitude (y axis). The red line represents the upper
limit for the various combinations of the two, after which no longer has the accuracy required for
the picking application.
 |
 |
Figure 7: In these simulations, some obstacles prevent the AGV to arrive directly to the target.
The path is planned by varying the initial curvature of the cubic clotoide (red dotted curve), so
that the vehicle avoids obstacles.
One of the goals of my work involves navigating of Industrial Autonomous Vehicles for long distances in unstructured environments. Is therefore necessary to use some techniques that belong to the theory of SLAM (Simultaneous Location & Mapping).
In particular, I implemented an algorithm that, through the theory of probabilistic Occupancy Grids, allows to create a map of the environment from the distance data measured by the laser-range finder sensor. The domain is divided into cells to which is assigned a probability of occupation, that is updated at each laser scanning, with a frequency of about 10Hz. It’s possible to display the map as a grayscale image, where the intensity of each cell corresponds to the probability of occupation.
The planning task with Cubic Clothoids has been integrated with the mapping algorithm to implement techniques that ensure the generation of paths with no obstacles (Obstacle Avoidance algorithms and Navigation in completely unstructured environments).
The theoretical treatment and the algorithms implemented in the present paper are functional to navigation of autonomous mobile vehicles. In fact, the topics are not just about planning trajectory, as the title of thesis suggests, but also include strategies for motion control, methods for locating the target (and vehicle), and automatic mapping of environments. These techniques, used in conjunction with each other, allowing to obtain a robust and complete system for navigation of an AGV in a completely unstructured environment , and allow the interaction of features related to the paradigm of mobile robotics: Sense, Plan, Act.