
This research project born within a collaboration between the Department of Industrial Engineering of University of Trento and Fly SpA.
The main purpose is to develop a robotised system for grinding of Titanium welded components for aeronautic application, with particular regard for the welding of titanium alloy outlet guide vanes.

The whole research work can be divided into two sections:
Firstly, carrying an experimental campaign with grinding operators for find an empirical or semi-empirical relationship between the process parameters and a suitable quality characteristic. Thanks to this study, the grinding process can be optimized and the found parameters can be used in an automated process.
The selected process parameters, analyzed after the development of a test bench, are:
- Grinding tool inclinations: azimuth and elevation;
- Tool feed speed;
- Vertical load of the tool;
- Tool torque (pressure);
- Abrasive material;
After a statistical study of the test results, the process will be optimized in terms of time and material used.

ANOVA Complete factorial plane 2^6 with RStudio software
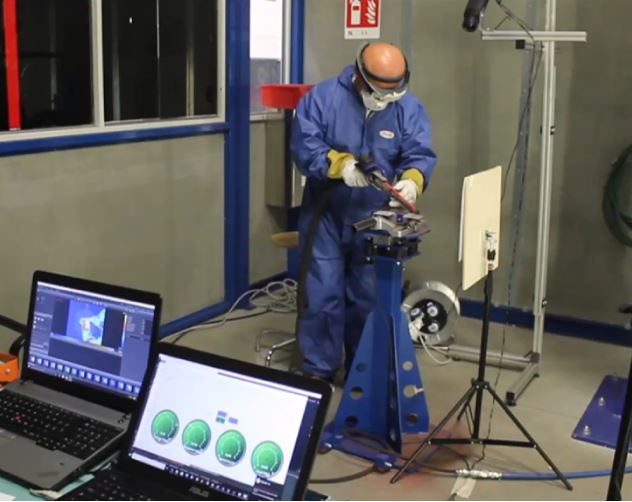
The architecture of the system used for the acquisition of the process parameters can be seen in the following figure.  Acquisition system for the process parameters
Acquisition system for the process parameters
The acquisition interface for the computer is designed with the QT library; For the load cell reading is used a national instruments board. For the communication with the laptop interface and with the Hololens are used respectively the ZeroMQ and MQTT libraries.

Moreover, to make robust the acquisition of the whole system’s architecture, some HTC tracker tests have been done with the vibrations of the tool and with sparks released during the grinding operation.

In a first analysis, the whole acquisition structure has been also useful to qualify the robotic grinding process, sensorizing the robotic grinding cell as it is done for the manual cell. This approach highlights the differences between the two ways of working and analysing the relative results, in order to test and validate the equipment and consumable used.

Manual process VS Robotized process
In the second section of the work a system for measuring the profile of the weldings with the aim of enabling an automated grinding process is developed to be implemented in the robotic cell.

Robotic cell
In the second section of the work, a system for measuring the profile of the weldings with the aim of enabling an automated grinding process is developed.
The proposed instrument is a high-speed 2D/3D Laser profiler.

Furthermore, by using an optical prism the laser path is triangulated to gain access between the vanes.

3D printed support between Keyence sensor head and optical prism
After that the acquisition configuration components are chosen, they will be implemented and simulated on a robot arm.

Robot arm simulation with the designed system on the OGV’s vanes