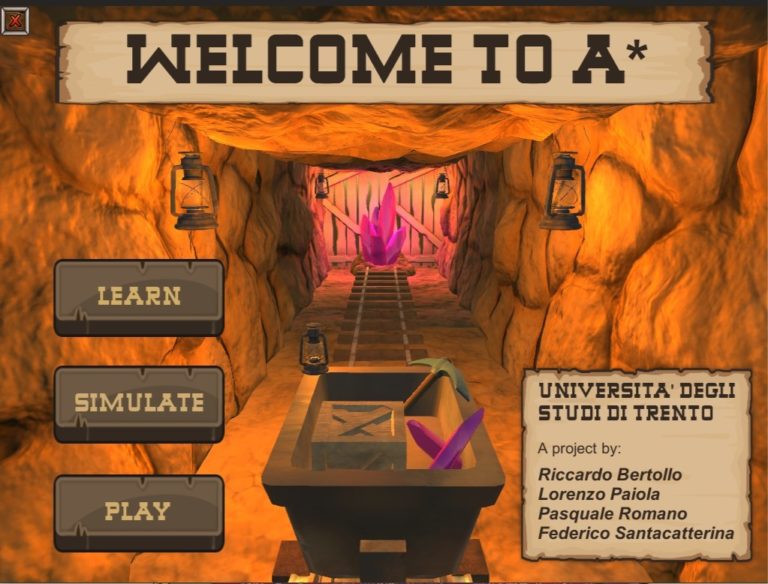
Kinematics – Group 2

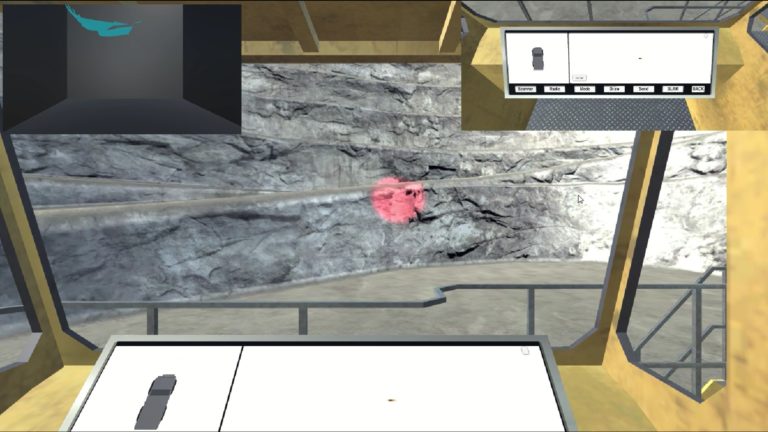
An interactive lecture on path following algorithms The core idea of the project is to provide a tool able to support the teacher in explaining the theory, make the lesson more appealing and help the student in visualizing the concepts…