
Vehicle Pose Detection in 2D Equirectangular Images
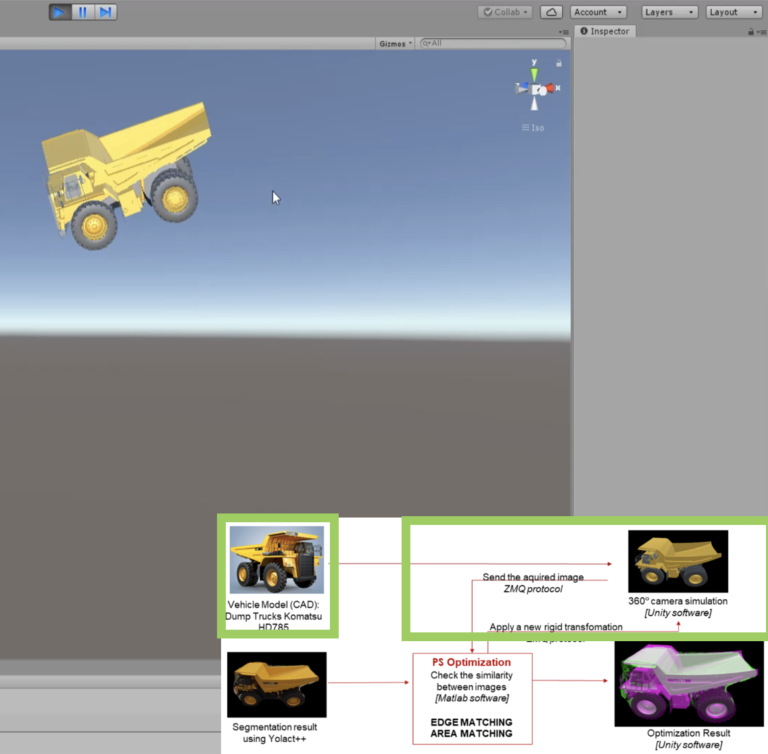
In this work, we address the problem of estimating the 6DoF pose of objects in 2D equirectangular images. This challenge allows the transition to the objects’ 3D model from their current pose. In particular, it finds application in the educational…